2 March 2018 – If you ask renowned roboticist and Stanford University Professor Oussama Khatib whether robots would replace human jobs in the future, he will tell you it is not robots that we should fear.
Instead, Prof Khatib, currently in NUS Computing as a Visiting Professor, will name computers as the object of concern. “It’s computers that are automating processes, not a robot,” he said.
People who are afraid of robots or who subscribe to the robotic doomsday narrative do not fully understand robotics, said Prof Khatib. This misconception is due to the first phase of robotics, where robots in the manufacturing industry operated in a fairly autonomous manner. However, Prof Khatib sees them more of programmable machines rather than robots.
“Robots are the most advanced and intelligent tools that humans are developing. They are built to serve and help the human,” Prof Khatib added.
With robots leaving their well-defined environments for an unpredictable outdoor setting, the tasks robots have to perform becomes more complicated. Robots will become more reliant on humans and less autonomous as robots do not possess important soft skills, like intuition and expertise, that are necessary for the tasks, explained Prof Khatib.
When it comes to improving the adaptability of robots to their environments, Prof Khatib is no stranger to the field. He started working on robotics during his Ph.D. studies at Sup’Aero, Toulouse, France, in 1980. Back then, the field of robotics was relatively new. Prof Khatib’s Ph.D. thesis proposed a revolutionary new way of programming robots.
“In most industries, [programmers] would programme every joint motion and synchronise them to produce an action. However, if you change the environment, everything becomes wrong. So what we tried to do is to programme the robot to be like a human,” explained Prof Khatib.
And so Prof Khatib embarked on creating a programme, called the artificial potential field,that allows robots to autonomously avoid obstacles in real time. His idea is based on the concept of negative and positive charges, where obstacles are seen as negative charges, while objects guiding the robot’s trajectory become positive charges. This method would result in the robot autonomously repelling against ‘negative charges’ or obstacles, and moving towards the intended direction.
“The idea is very similar to that of human movement. If you reach for a bottle, you don’t tell your joints to move at a precise angle, but you figure out a movement based on the environment. I wanted to create a programme that is not specific for just one robot,” Prof Khatib explained.
To put his thesis into action, Prof Khatib travelled from his home university in Toulouse to Montpellier to implement his method on an available robot. “Getting it to work took forever,” Prof Khatib laughed, “Every day, I would just assume that something is broken.”
However, one afternoon, Prof Khatib and his team decided to give the programme one more try, with little expectation that it would work. “I placed the obstacle and the robot went ‘vroom’ and avoided the obstacle,” exclaimed Prof Khatib, “We were so happy–we brought our professor in to witness it and he was so excited.”
“Unfortunately, I don’t have a video recording [of the project] because this was back when video cameras weren’t that accessible,” Prof Khatib chuckled.
After his Ph.D. studies, Prof Khatib took up a post-doctoral position in Stanford University and has since been working there. He is now a Professor of Computer Science and the Director of Stanford Robotics Lab.
His thirty years of robotics career have earned him many awards and accolades, including the IEEE Robotics and Automation Society (RAS) Pioneer Award, the IEEE George Saridis Leadership Award in Robotics and Automation, the Japan Robot Association (JARA) Award, the Rudolf Kalman Award and the IEEE Robotics and Automation Technical Field Award. He was also recently elected to the US National Academy of Engineering.
Throughout his long and illustrious career, Prof Khatib has amassed many interesting and exciting robotics projects. He cites his latest deep-sea expedition to the Mediterranean as one of the most memorable projects of his career.

Prof Khatib and his team in Stanford designed and built an five-foot long, orange, robo-mermaid called Ocean One, that would make deep sea exploration safer for divers. The robot is fitted with hands that can relay the sensation of touch to its pilot, and can withstand depths that humans cannot. Pilots provide their intuition and expertise to the robot as they control Ocean One, without having to put themselves in any danger.
In April 2016, Prof Khatib’s robot went on its maiden voyage in the Mediterranean to King Louis XIV’s sunken ship La Lune. The ship, which sank in the 17th century, has been untouched and inaccessible to humans, until Ocean One.
The team, however, almost lost their robot when Ocean One found itself wedged between two of the ship’s cannons. Prof Khatib’s student, who was piloting the robot, tried maneuvering Ocean One in all directions but to no avail. To make matters worse, the weather at sea level was worsening and it was already close to midnight.
“The captain told me, ‘Oussama, we have to leave, the weather is really bad and we have to leave.’ I said ‘No way I’m leaving without the robot’,” said Prof Khatib.
“I looked at the robot, I looked at the screen and took control of the robot’s hand controls. Suddenly, I had the embodiment of the robot. I realised that its elbow was stuck and if I pushed its hand against the seabed, it would free the robot.”
Prof Khatib maneuvered the pushup, which did the trick and freed the robot from its place. Crew members on board cheered as Ocean One was fished out from the water. The team deployed the robot again a few days later and was able to successfully complete the mission. Ocean One brought back a grapefruit-sized vase, an archeological treasure that has not been above the sea level for three and a half centuries.
Ocean One’s dive sets a precedence for a future where work that is too dangerous or difficult for a human can be outsourced to a robot. “The robot is going to be an intermediary with capability to make human work better,” said Prof Khatib.
Currently on his sabbatical leave, Prof Khatib chose to visit NUS Computing at the invitation of Professor David Hsu, Professor of Computer Science, Deputy Director of the NUS Advanced Robotics Centre and a Stanford alumnus. “I have been working with Singapore for almost 20 years. Singapore has all diverse components of robotics available. It was very natural that I would come to NUS,” said Prof Khatib.
“I knew David for a long time and really liked his work in motion planning, which is very important to robotics. So we decided that I will be hosted here,” Prof Khatib added.
Returning back to the question of whether robots could replace human jobs in the future, Prof Khatib conceded that there is still a possibility of it happening. He added that it would take a large amounts of development and time before robots were to reach that stage. Nevertheless, Prof Khatib believes that future developments in robotics would lead to greater robot-human collaboration and a better future for humans.
“I’m an optimist,” said Prof Khatib with a smile.
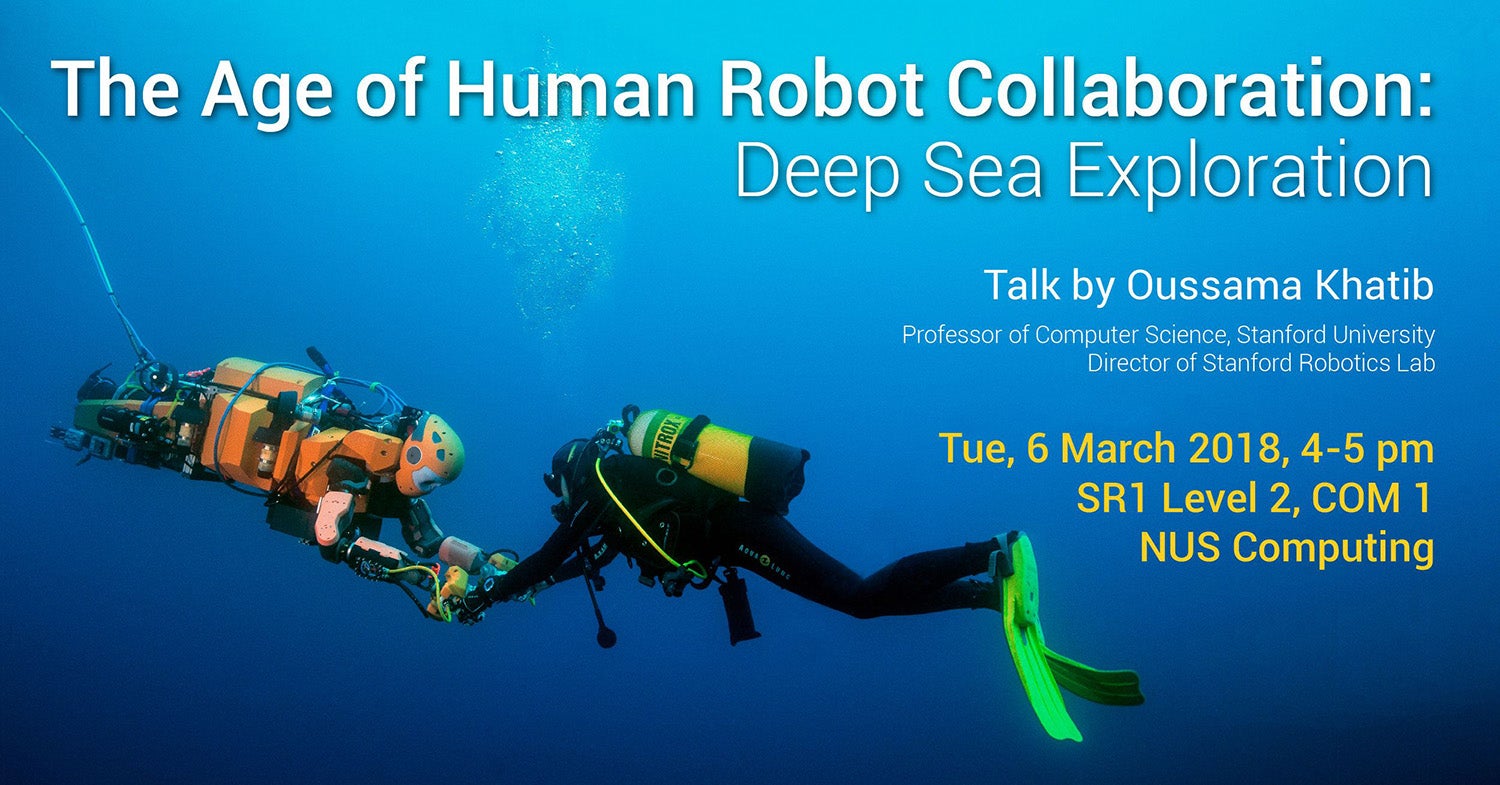
Professor Oussama Khatib will be giving a talk about the Ocean One expedition and the future of robot-human collaboration on Tuesday, 6 March 2018. It will be held in Seminar Room 1, NUS Computing, from 4 to 5pm. All are welcome to attend and admittance will be on a ‘first-come, first-served’ basis.